






Jetson Orin Nano UGV Rover ROS2 6 Wheels 4WD Open Source AI Robot with Dual Controllers Gimbal 360° Flexible For Jetson Orin Series Board
170

 Direct purchase from the factory
Direct purchase from the factory 
Checkout garantit sikur

 Rigal b'xejn
Rigal b'xejn
 Politika tat-tbaħħir
Politika tat-tbaħħir Politika tar-ritorn
Politika tar-ritornRigal B'Xejn
Merħba għal Roymall, is-sit professjonali tiegħek għal xiri ta' rigali ta' kwalità għolja. Napprezzaw is-sapport tiegħek u rridu nuruk gratitudni billi noffru rigal b'xejn ma' kull ordni.Politika tat-Tbaħħir
Oġġetti jintbagħtu fi żmien 2-5 ġranet tax-xogħol. Ordni ta' aktar minn $9.9 jintbagħtu b'xejn.1. Politika tar-Ritorn
Oġġetti jistgħu jintirbu sa 40 jum. Oġġetti personalizzati ma jistgħux jintirbu.2.Politika tar-Rifużjoni
Ir-rimi jintirbu bl-istess metodu ta' ħlas oriġinali.
Specifications:
Model: UGV Rover ROS2
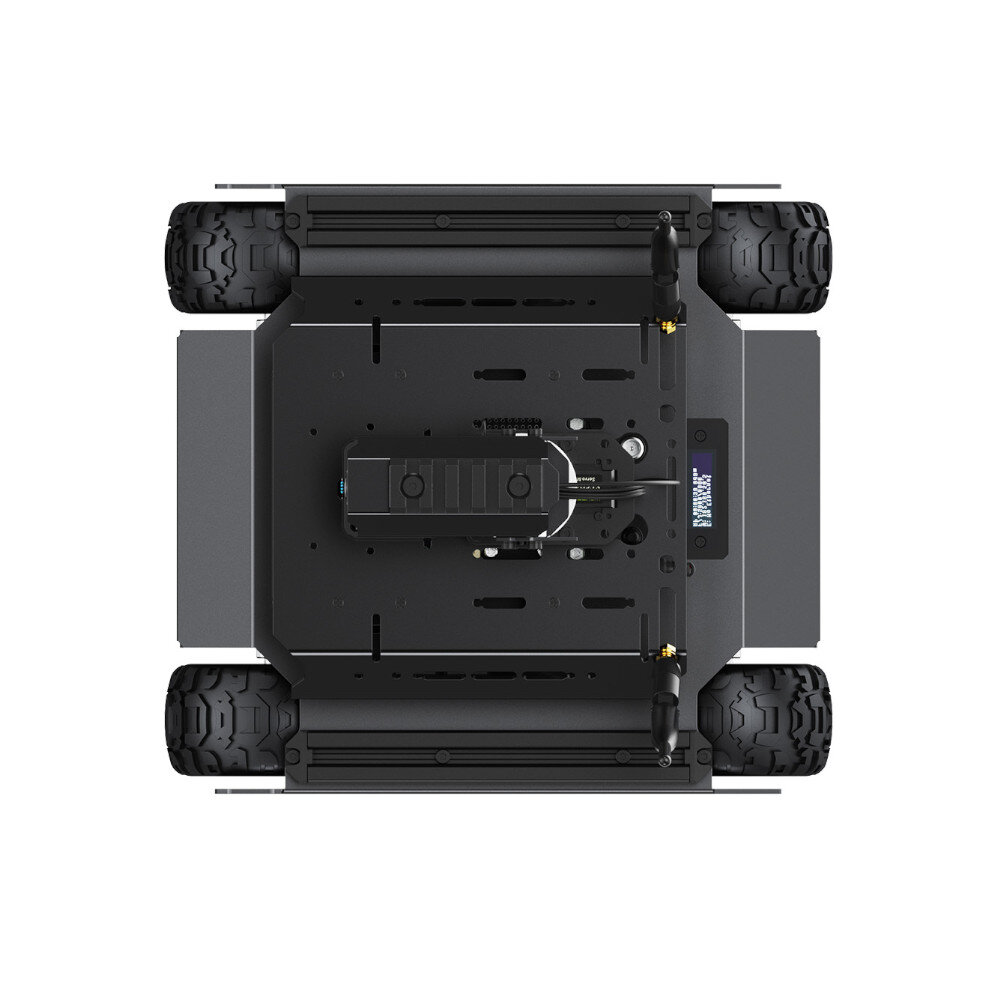
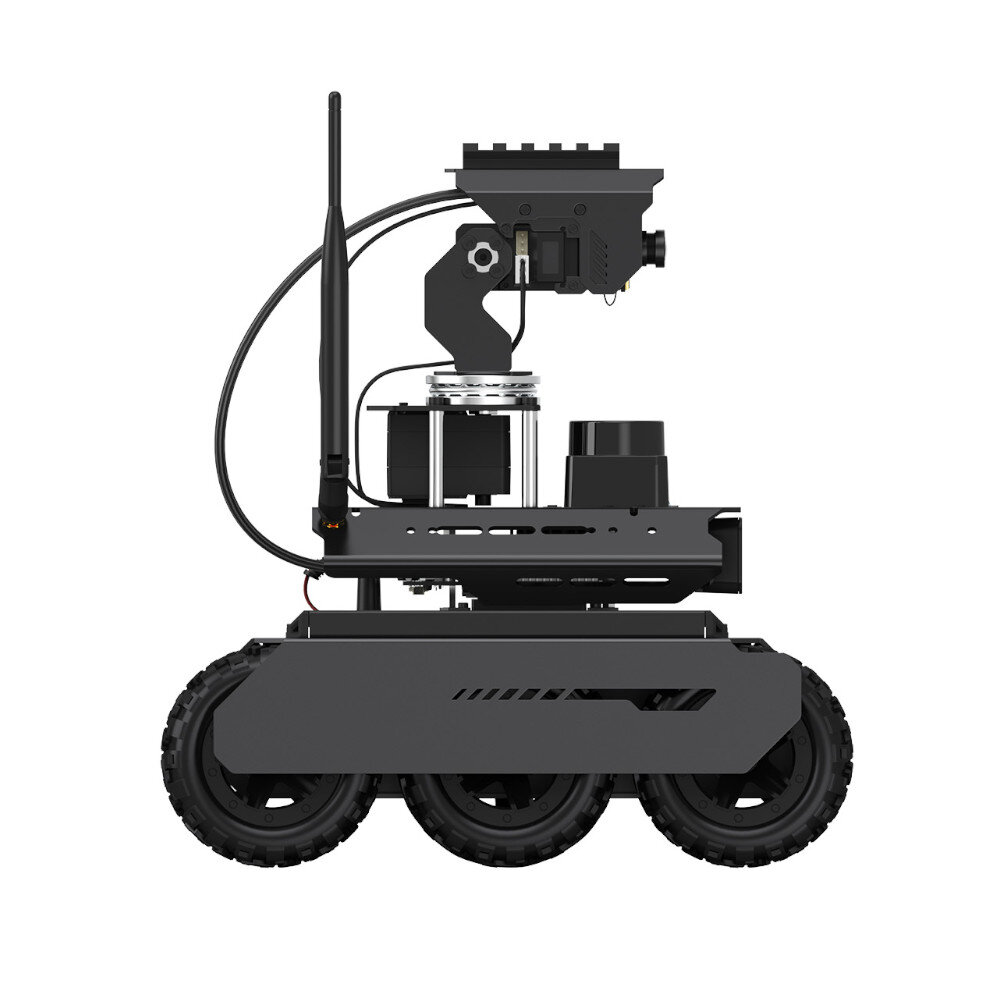
Wheel Configuration: 6 Wheels, 4 Wheel Drive (4WD)
Compatibility: Designed for Jetson Orin Series Board
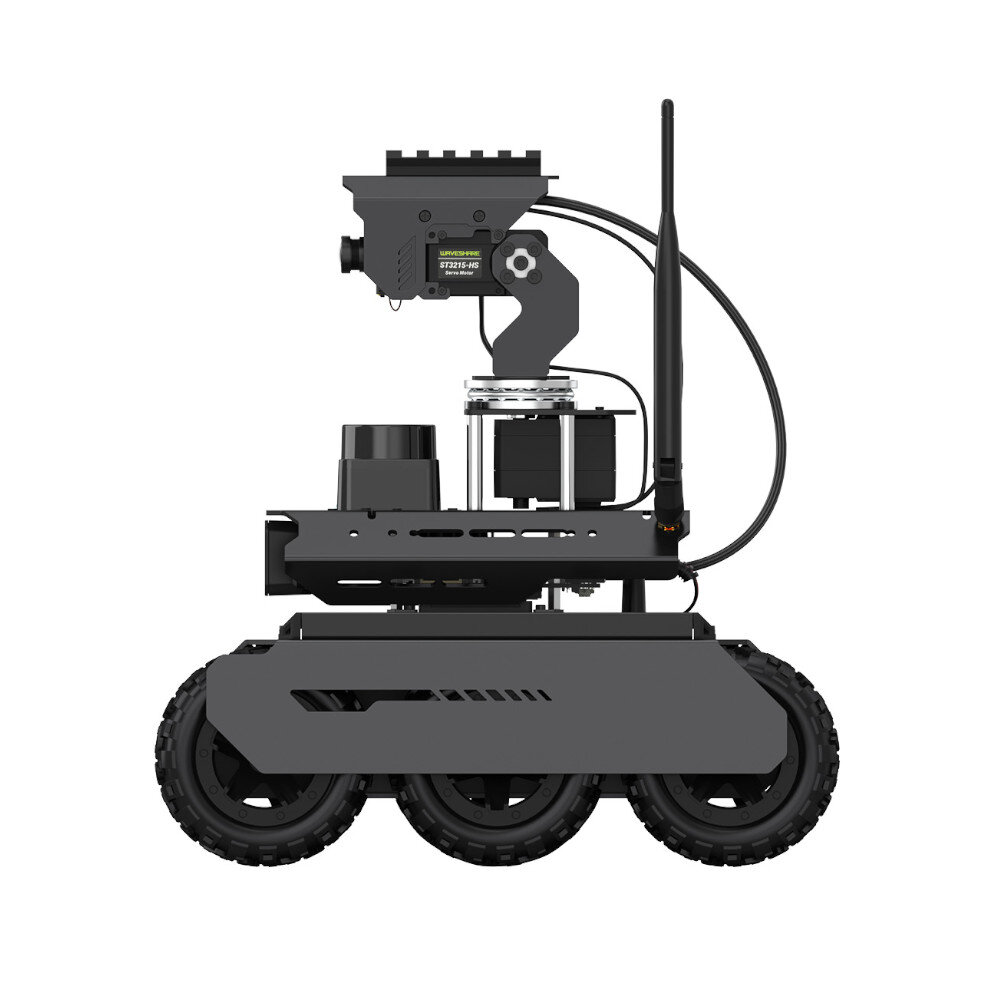
Gimbal: 360u00b0 Flexible Dual-axis Gimbal
Controllers: Dual Controllers
Dimension: 253*231*289mm
Chassis Height: 25mm
Pan-Tilt DOF: 2
Pan-Tilt Servo Torque: 30KG.CM
Pan-Tilt SERVO: ST3215 Servo
Host Controller: Jetson Orin Nano 4GB Kit(Only Motherboard Type have)
Host System Support: ubuntu 22.04
ROS2 Version: ROS2-HUMBLE-LTS
Camera FOV: 160u00b0
Power Supply: 3S UPS Module
Battery Support: 18650 lithium battery x 3 (not Included)
Demo Control Methods: Web application / Jupyter Lab interactive programming
Default Max Speed: 1.3m/s
Number of Driving wheels: 4
Tire Diamter: 80mm
Tire Width: 42.5mm
Minimum Turning radiius: 0M(In-situ rotation)
Features:
1. ROS2 Open-source System: Supports a variety of programming languages and development environments.
2. 360u00b0 Flexible Dual-axis Gimbal: Provides smooth and stable footage, ideal for high-precision applications.
3. Jetson Orin Compatibility: Highly compatible with advanced AI applications and machine learning tasks.
4. Dual Controllers: Includes both PC controller and remote for versatile operation options.
5. Multiple Auto Navigation Modes: Enables autonomous navigation with SLAM, GPS, and visual positioning capabilities.
Package Include:
1x UGV Rover ROS2 Robot
1x Jetson Orin Motherboard(Optional)
1x Power Adapter
1x Wireless Gamepad
1x Green/Red/Blue Plastic Balls
1x Phone Holder+1/4"" Screws
1x Yellow Tape
1x Screws Pack
Model: UGV Rover ROS2
Wheel Configuration: 6 Wheels, 4 Wheel Drive (4WD)
Compatibility: Designed for Jetson Orin Series Board
Gimbal: 360u00b0 Flexible Dual-axis Gimbal
Controllers: Dual Controllers
Dimension: 253*231*289mm
Chassis Height: 25mm
Pan-Tilt DOF: 2
Pan-Tilt Servo Torque: 30KG.CM
Pan-Tilt SERVO: ST3215 Servo
Host Controller: Jetson Orin Nano 4GB Kit(Only Motherboard Type have)
Host System Support: ubuntu 22.04
ROS2 Version: ROS2-HUMBLE-LTS
Camera FOV: 160u00b0
Power Supply: 3S UPS Module
Battery Support: 18650 lithium battery x 3 (not Included)
Demo Control Methods: Web application / Jupyter Lab interactive programming
Default Max Speed: 1.3m/s
Number of Driving wheels: 4
Tire Diamter: 80mm
Tire Width: 42.5mm
Minimum Turning radiius: 0M(In-situ rotation)
Features:
1. ROS2 Open-source System: Supports a variety of programming languages and development environments.
2. 360u00b0 Flexible Dual-axis Gimbal: Provides smooth and stable footage, ideal for high-precision applications.
3. Jetson Orin Compatibility: Highly compatible with advanced AI applications and machine learning tasks.
4. Dual Controllers: Includes both PC controller and remote for versatile operation options.
5. Multiple Auto Navigation Modes: Enables autonomous navigation with SLAM, GPS, and visual positioning capabilities.
Package Include:
1x UGV Rover ROS2 Robot
1x Jetson Orin Motherboard(Optional)
1x Power Adapter
1x Wireless Gamepad
1x Green/Red/Blue Plastic Balls
1x Phone Holder+1/4"" Screws
1x Yellow Tape
1x Screws Pack
Electronics Ranking





